미래 대잠전용 지속운항형 무인선박(ACTUV)을 위한 해상 자율 시스템 자율 유도 항해 시험 성공

사진 - 시험선박
미국의 방위사업체 Leidos가 DARPA의 대잠전용 지속운항 무인선박(ACTUV) 프로그램을 위한 해상 자율 시스템 프로토타입의 첫 자체 유도 항해를 미시시피주 Gulfport와 Pascagoula 사이에서 마쳤다고 발표했습니다.
센서, 기동 그리고 ACTUV 프로토타입의 임무 작동을 시험하는 대리자로 해상 자율 시스템 프로토타입이 장착된 42인치 크기의 보트가 사용되었습니다. ACTUV는 원격 감시 제어하에 움직이며 COLREGS로 불리는 "바다의 규칙"에 따라 충돌을 회피하여 안전한 독립적으로 배치되는 무인 함선을 개발하기 위한 것입니다.
메모리에 입력된 항법 차트와 상업용(COTS) 레이더에서의 입력과 함께 오로지 자율 시스템에 의하여 조종된 대리 선박은 내륙 수로의 복잡한 연안 환경을 성공적으로 항해했습니다. 35 해리를 항해하는 동안, 해상 자율 시스템은 설계대로 작동했습니다. 보트는 모든 장애물, 부표, 지상, 얕은 물, 그리고 지역의 다른 선박들을 어떤 사전 계획된 경로와 인간의 간섭 없이 잘 피했습니다.
Leidos사는 ACTUV 소프트웨어와 센서들을 시험하기 위해 계속 대리선박을 사용할 것이며, 오레건주 Clackamas에서 첫 ACTUV 프로토타입인 Sea Hunter 건조를 계속 해나갈 것이라고 합니다. Sea Hunter는 2015년 늦가을에 진수되고 곧이어 Columbia 강에서 시험을 시작할 예정입니다.
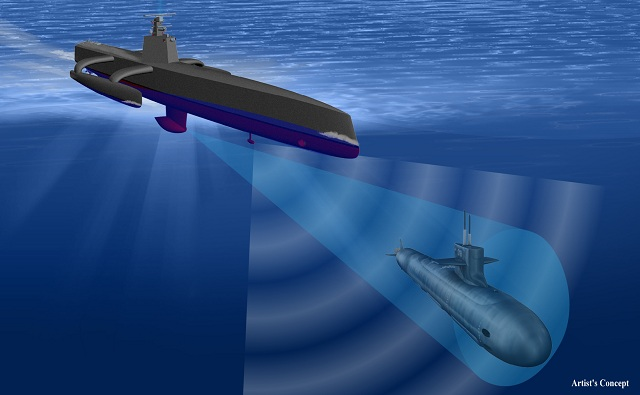
Sea Hunter ACTUV
 폴라리스
폴라리스