
국제군사과학기술 경진대회 2일차 후기 - 3
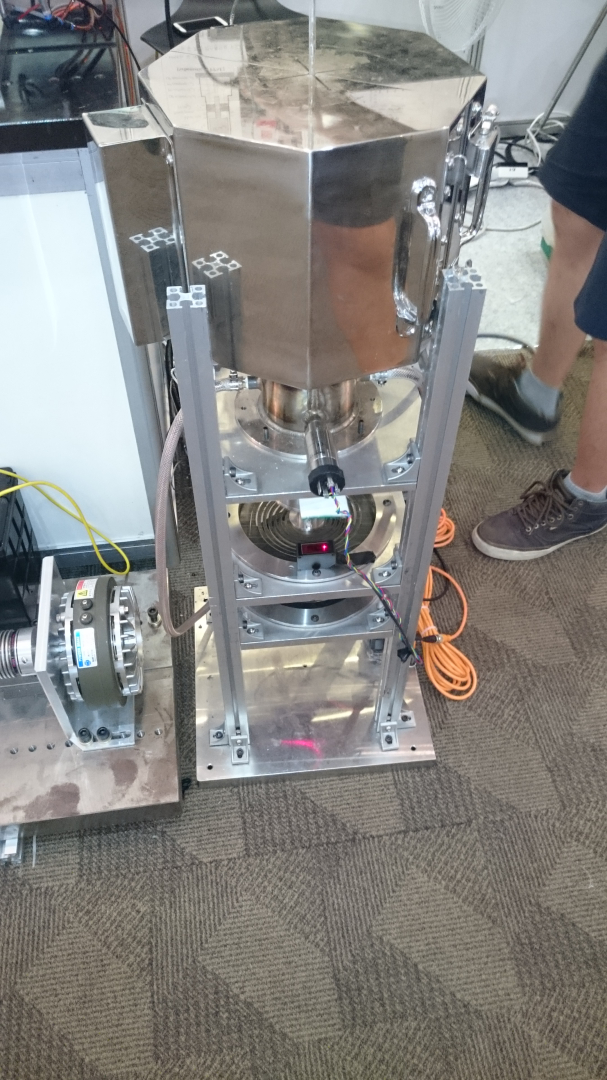
어제 제가 스털링 엔진이라 소개했던 건 초소형 가스터빈 엔진을 결합한 파워팩의 구동 테스트를 위한 모터였더군요. 이녀석이 진짜 스털링 엔진입니다.
프리피스톤 스털링 엔진과 선형 발전기로 구성된 스털링 파워팩 프로토타입인데,
스털링 엔진은 다양한 열원을 이용해 정숙성을 유지하고 배기가스가 없이 반영구적으로 발전이 가능하기 때문에
우주항공, 잠수함 등의 분야에 적용할 경우 상당한 이점이 있다고 하네요.
고온부 열 원온도가 800°C 일 때 열역학적 출력이 약 100W, 총 효율이 9.8%의 성능을 낸다고 합니다.

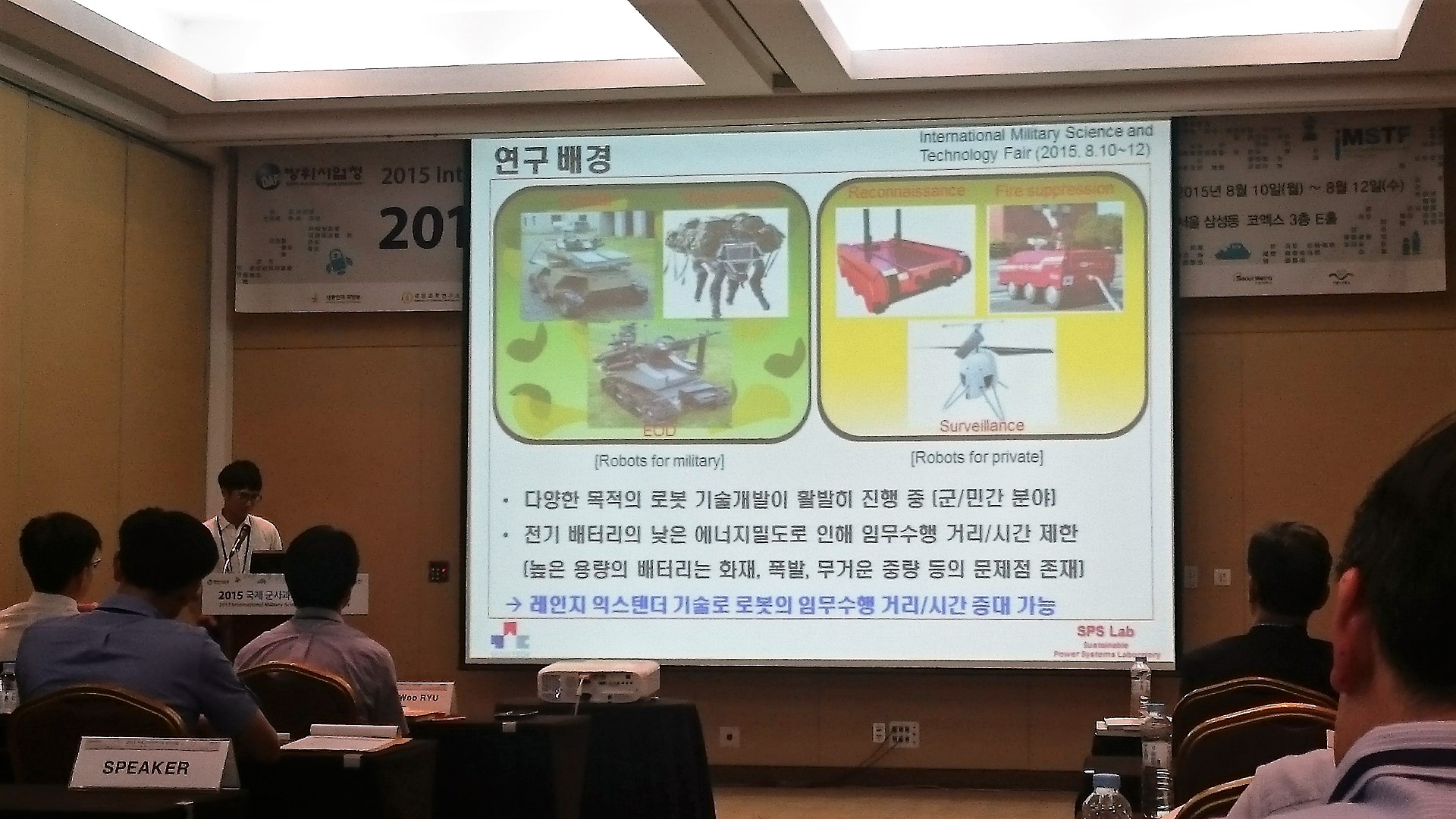
가장 오른쪽에 있는게 다지형 정찰 구현을 위한 6족 로봇이고,
가운데 있는 건 정체불명.
왼쪽에 있는건 지상 및 항공정찰이 가능한 쿼드롭터와 지상정찰로봇의 혼종(?)이라고 합니다.
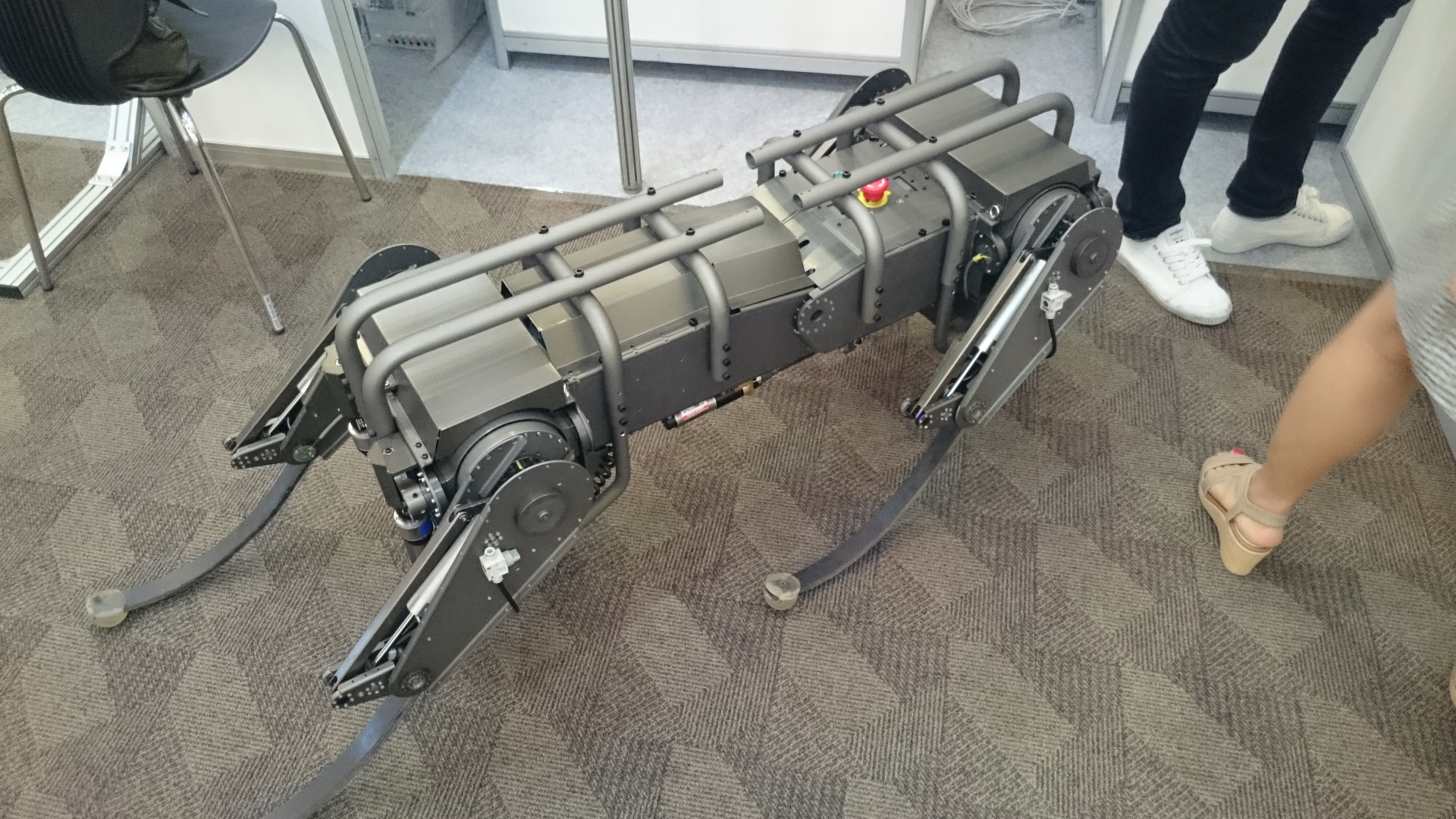
진동억제 보행이 가능한 바이오모방 4족 고속주행 로봇이라고 합니다.

근육모방 구동 메커니즘을 적용한 달리기용 입는 로봇이라고 합니다.
고속 주행이 가능한 동물의 근골격계를 모방하여 이관절근구동 메커니즘을 입는 로봇에 적용했고,
이를 착용한 병사의 족저압을 분석해 근력증강 알고리즘을 구동하는 제어기술을 적용했다네요.

하이브리드 구동방식의 병사용 근력보조 입는 로봇이라고 하네요.
배터리 소진 시에도 관절을 자유롭게 움직일 수 있게 클러치 메커니즘이 적용되었다고 합니다.

일종의 방수 코팅인 듯한데 물리적 통기성은 그대로 가지면서도 원단의 표면은 수분을 흡수하지 않게 된다고 합니다.
코팅층이 원사를 감싸서 산화를 방지해주는 덕분에 원단의 수명도 연장된다네요.

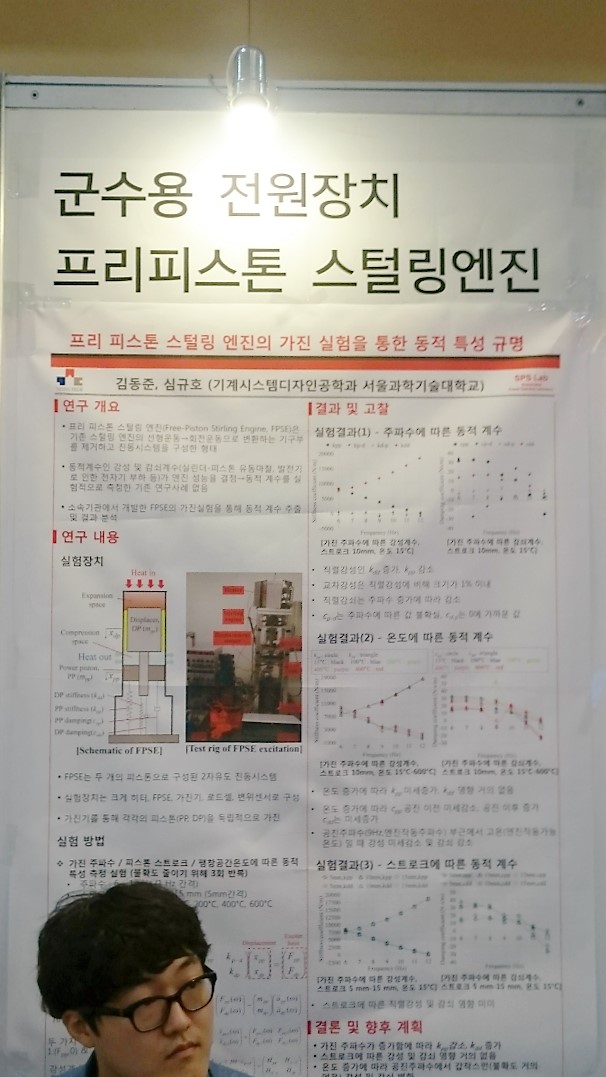
전시는 그다지 볼 게 많지 않아서 학술논문 발표도 구경했는데, 이거 말고는 좀 지루하더군요.
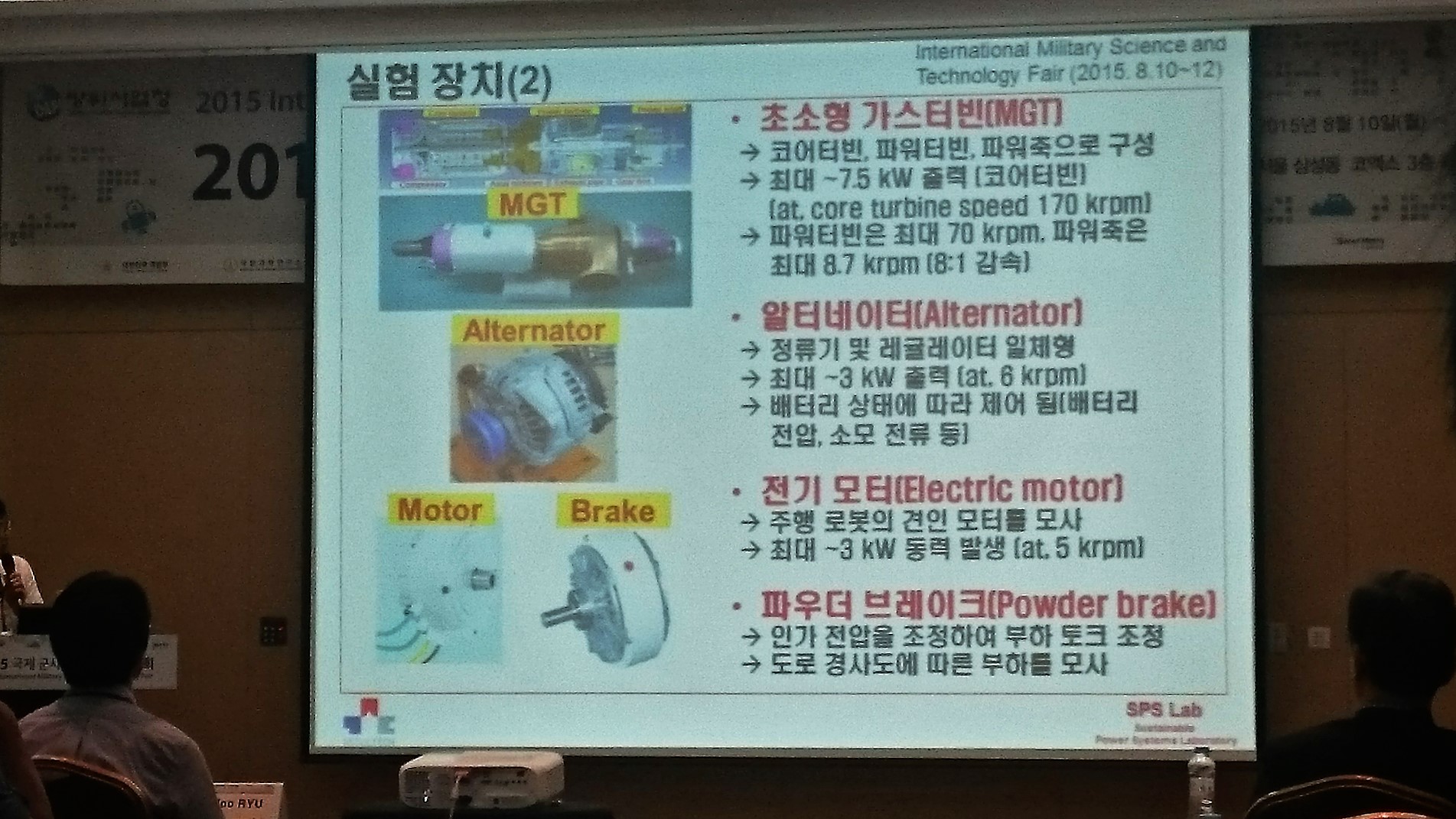
위에서 설명드린 초소형 가스터빈 엔진에 대한 발표였습니다.
 Sheldon
Sheldon



그리고 생각보다 그렇게 볼거리가 많지는 않았습니다.
국내 왠만큼 큰 로봇 연구실은 죄다 건드는게 바로 저 외골격 로봇입니다.
이거 다 합치면 연구비용이 꽤 될텐데 죄다 파편화 되서 문제죠.
주로 산업화용 PLC 제어 로봇 쪽으로 많이 하고 군용은 잘 안하더라구요. 이런건 ADD에서 해야 하는데. ㅇㅅㅇ
미국도 항공모함 운영요원 및 지상기지 운영요원들을 위한 버전으로 육중한 버전을 준비중이고
보병들을 위한 경량형 2종류를 개발중이거든요.
유튜브를 보면 어떻게 움직이는 녀석인 지 알 수 있습니다.
https://www.youtube.com/watch?v=ISznqY3kESI#t=24

여쭤보니 일단 만든것에 의의를 두신다고....(원래는 민간용 보일러 같은 용도로 만드셨다고 하더라고요 ㅋㅋ)
사실 시중에 스털링엔진으로 전기 뽑아내는건 나와 잇는지라 ㅇㅅㅇ.
하이브리드로 효율 높이면서 넣을려면 흠 글쎄요.
요즘 연료전지 대채 비백금계 촉매로 탄소가 뜨고 있고 슬슬 유의미한 결과가 나오는지라 글쎄요.
